
Zeshi Yang (楊 澤世)
I am a researcher at Anuttacon, focusing on developing physically grounded and emotionally rich humanoid agents. My work combines video generation, motion synthesis, and reinforcement learning, aiming to use generative video models as world models that enable agents to perceive, reason, and interact with their environment.
Ultimately, I seek to bridge generative AI and decision-making systems to create intelligent digital humans and general-purpose humanoid robots. I have a lot of experience at realizing agile and dexterous motions on simulated humanoids. I received my Ph.D. in 2023 from Simon Fraser University, where I worked on character animation, motion control and deep reinforcemet learning. Prior to that, I earned a bachelor's degree in applied physics from USTC in 2018.
Education & Career
B.S. in Applied Physics, University of Science and Technology of China, 2014 - 2018
Ph.D in Computer Science, Simon Fraser University, 2018 - 2023
Visiting Scholar, Peking Univerisity, China, 2021 Aug - 2022 Aug
Research Intern, LightSpeed Studios, Tencent America, 2022 Sep - 2023 May
Research Scientist, miHoYo, 2023 June - 2024 Sep
Research Scientist, Anuttacon, 2024 Oct - Now
Projects

Core contributor of the audio-driven digital human system for Whispers from stars, an interactive story driven by AI chats and digital agents.
Publications

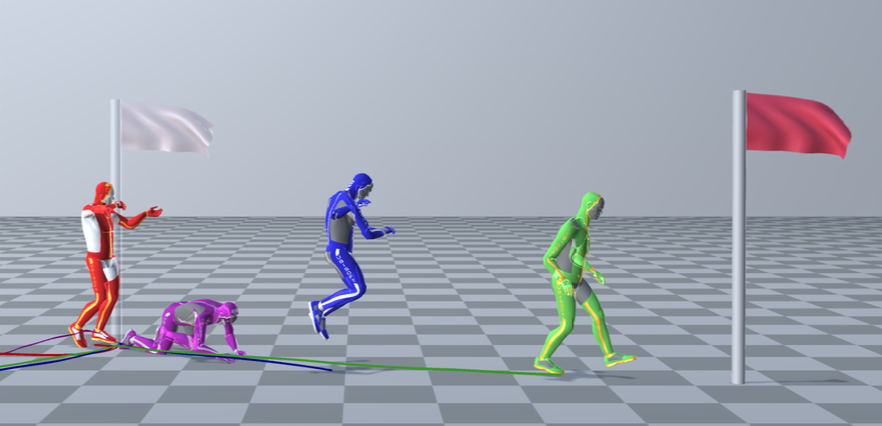
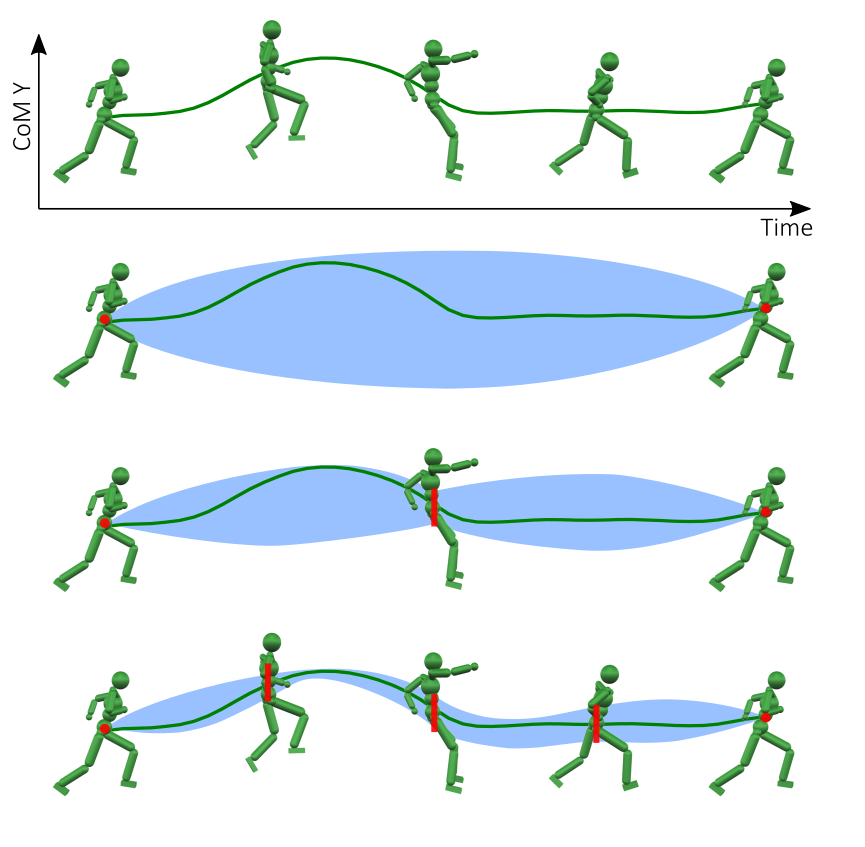
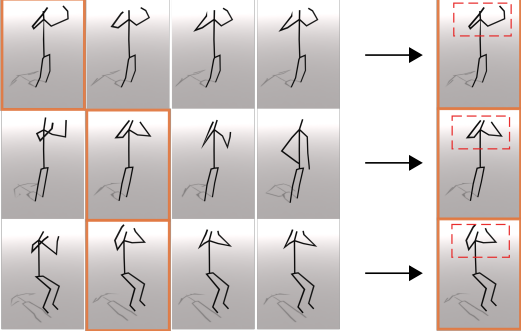
Real-time Diverse Motion In-betweening with Space-time Control
ACM SIGGRAPH Conference on Motion, Interaction and Games (MIG 2024)
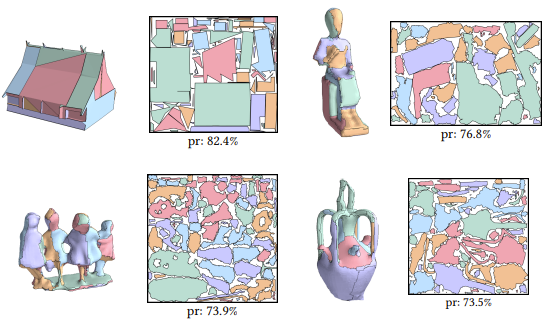
Learning-based 2D Irregular Shape Packing
ACM Transactions on Graphics, Volume 42, Article 6 (Proc. ACM SIGGRAPH Aisa 2023)
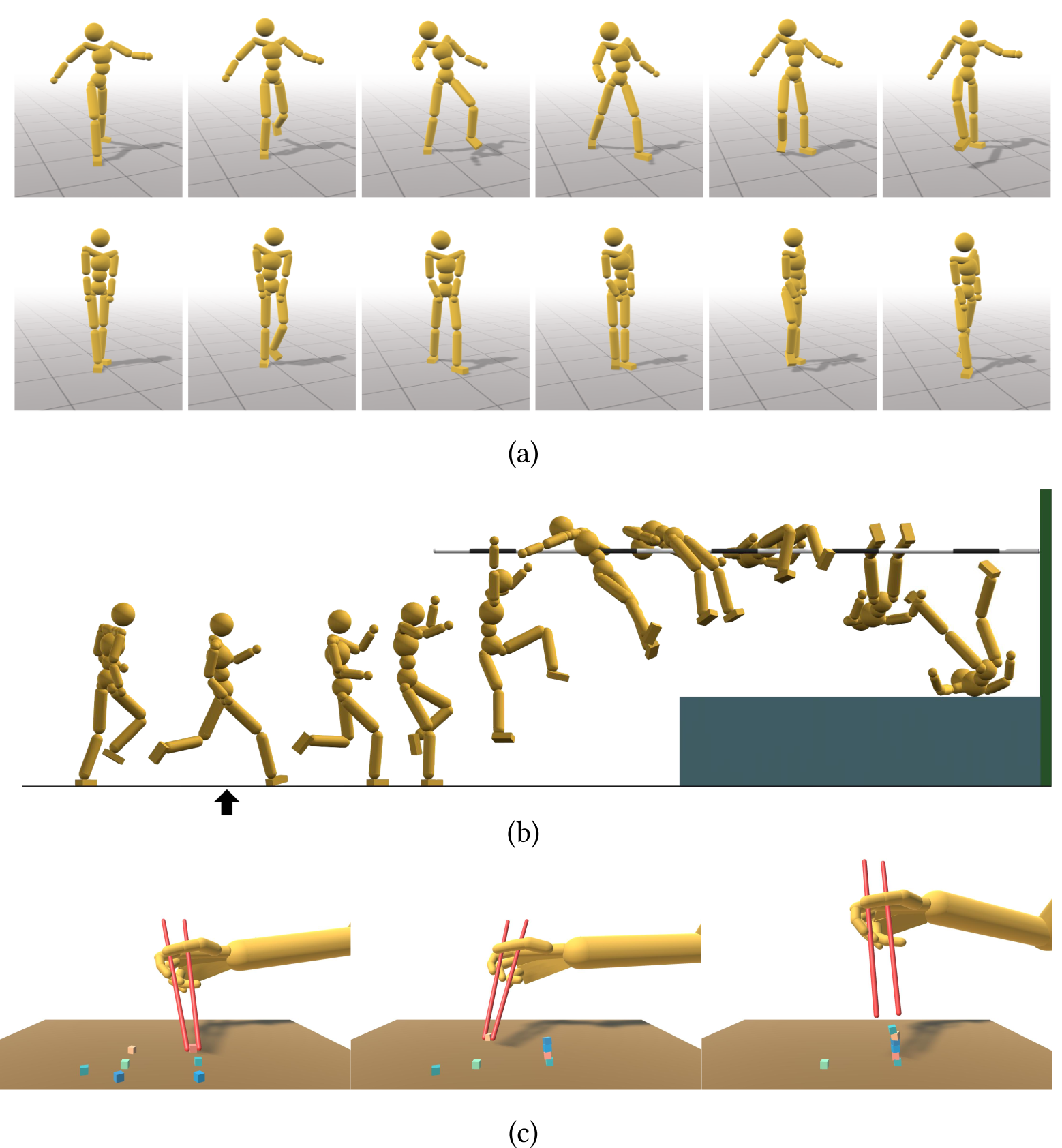
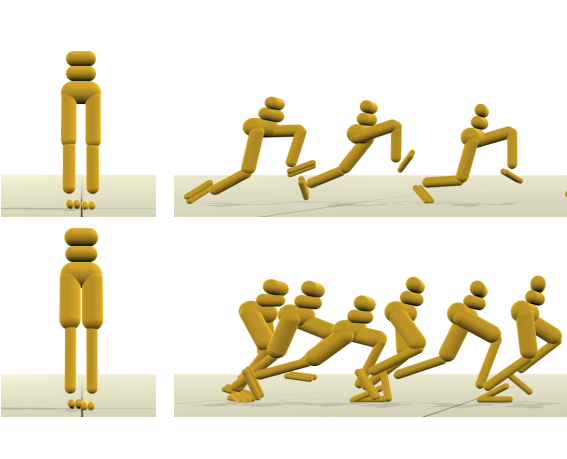
Acquiring Stylized Motor Skills for Physics-based Characters
PhD Thesis, Simon Fraser University, 2023
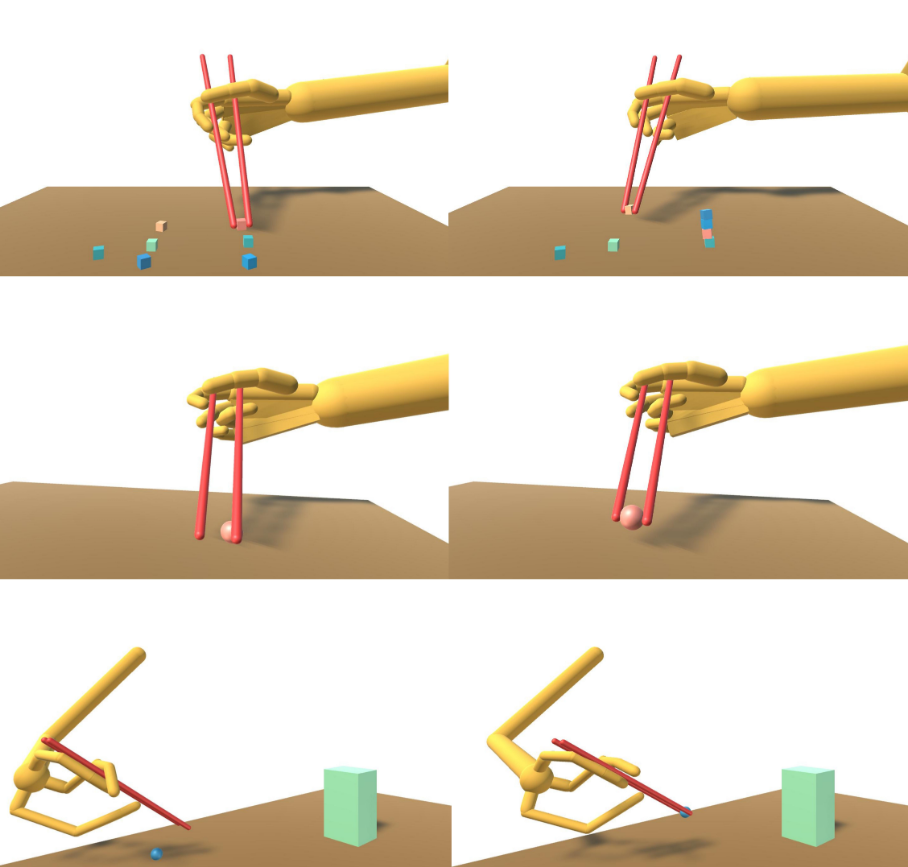
Learning to Use Chopsticks in Diverse Gripping Styles
ACM Transactions on Graphics, Volume 41, Issue 4, Article 95 (Proc. ACM SIGGRAPH 2022)
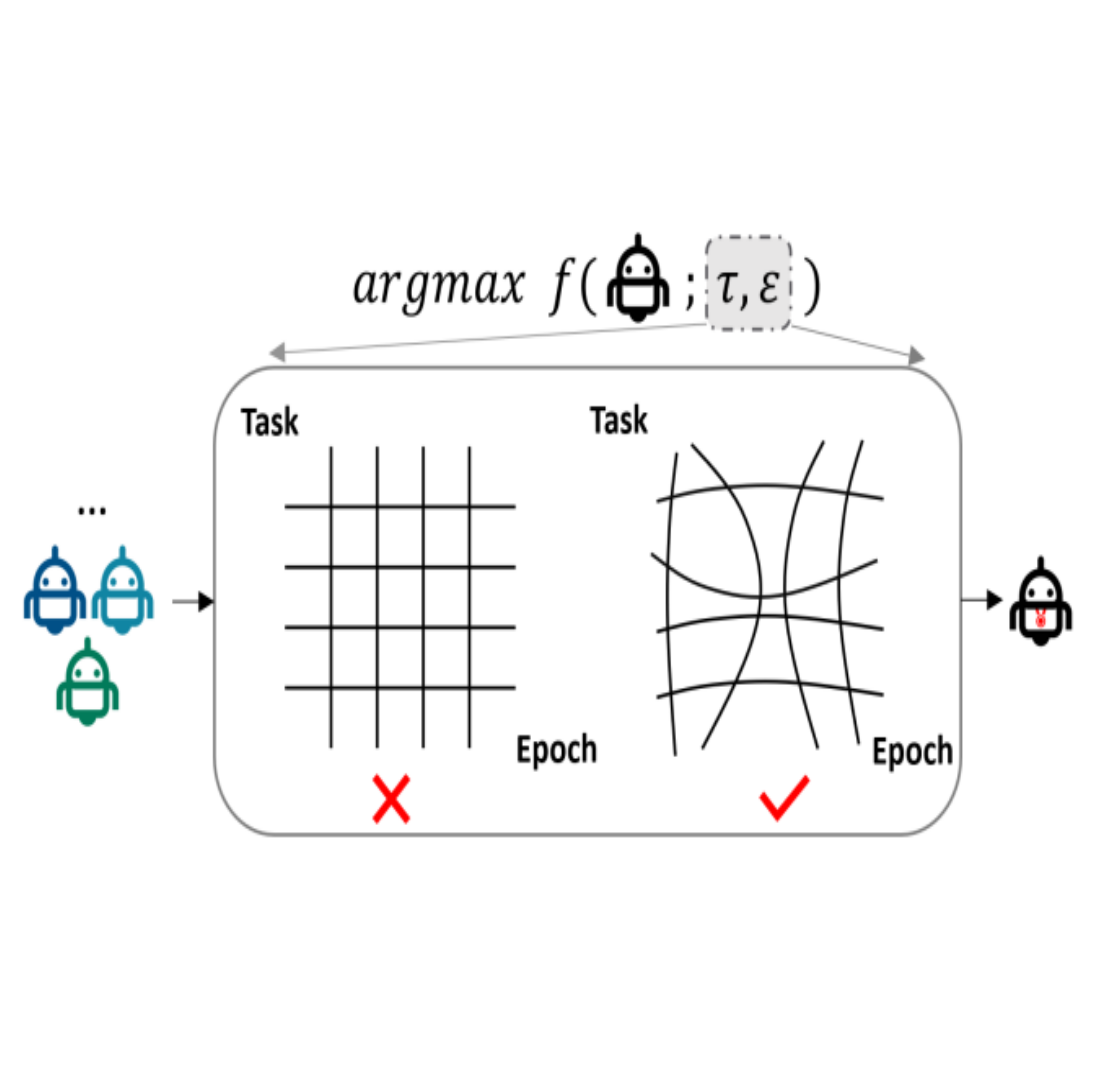
Efficient Hyperparameter Optimization for Physics-based Character Animation
ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games 2021 (I3D 2021)
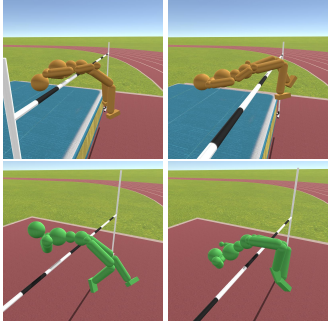
Discovering Diverse Athletic Jumping Strategies
ACM Transactions on Graphics, Volume 40, Issue 4, Article 91 (Proc. ACM SIGGRAPH 2021)
Neural fidelity warping for efficient robot morphology design
2021 International Conference on Robotics and Automation (ICRA 2021)

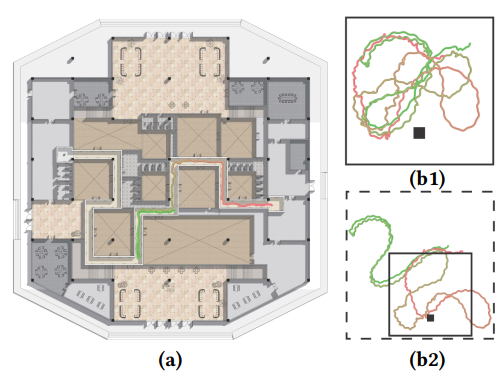
Redirected Smooth Mappings for Multiuser Real Walking in Virtual Reality
ACM Transactions on Graphics, 38(5), 2019.(Presented at Siggraph Asia)